Учени от Технологичния университет Нанянг в Сингапур, заедно с техни колеги от Япония, създадоха първата в света роботизирана линия за масово производство на киборг-хлебарка.
Технологията елиминира сложното ръчно производство на миниатюрни кибернетични организми в полза на стандартизирани продукти с по-стабилни характеристики. Това доближава използването на рояци киборги-насекоми в инспекции, разузнаване и помощ при бедствия.
Един от основните фактори, които провокират интерес към кибернасекомите, е тяхната висока издръжливост, като се има предвид, че съвременните батерии все още не осигуряват достатъчен капацитет с компактните си размери.
Добре хранен киборг-хлебарка ще работи по-дълго, по-надалеч и по-надълбоко в обектите, отколкото миниатюрен робот с пълен заряд на батерията, дори ако тя е направена по последна технология.
Киборгите-хлебарки могат да проникнат в сложни структури и механизми, без да е необходимо да ги разглобяват или унищожават. Движейки се в рояк, те са способни бързо да изследват огромни територии, които са труднодостъпни за хора и оборудване.
Неслучайно, значителна част от новия бюджет на Бундесвера ще бъде отпуснат за разработване на изкуствен интелект и биомеханични насекоми – това е стратегически важна област и за военните. Но за масовото използване на кибернасекоми е важно да се усвои индустриалното им производство.
Учените от Сингапур избраха за своята разработка една от най-големите хлебарки в света – съскащата мадагаскарска хлебарка, достигаща 7 см дължина. Съвременните електронни компоненти все още са твърде тежки за носене от повечето насекоми и тук размерът има значение.
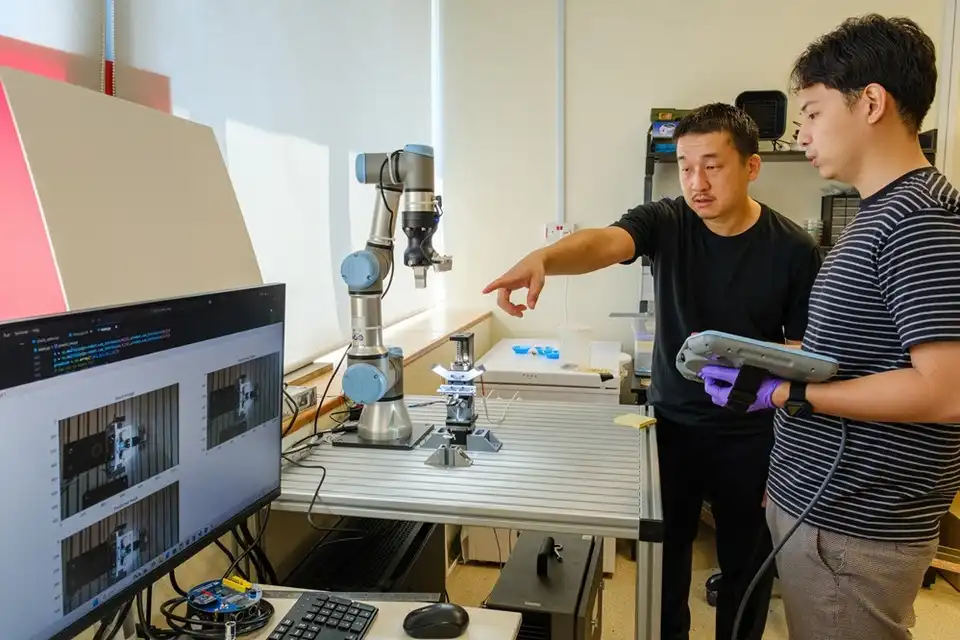
Ключовият елемент на поточната линия е индустриалният манипулатор Universal Robot UR3e със захват, както и система за компютърно зрение, базирана на дълбочинната камера Intel RealSense. Въглероден диоксид е използван като анестезия за насекомите.
Електрониката е разположена на малка платформа, която подобно на раница е прикрепена към гърба на хлебарката. За стимулиране на нервната система са използвани два биполярни електрода с игли и кукички на краищата – те са вкарани и закрепени в тялото на насекомото в областта на предните крака.
Сглобяването на един киборг отнема 68 секунди. Тестовете показват, че насекомите, събрани ръчно и на роботизирана линия, се контролират с еднаква ефективност. Завъртането се извършва чрез стимулиране на единия от предните крака, а спирането – чрез стимулиране на двата.
В експеримент по контрол на рояци четири киборга-хлебарки са изследвали почти цялата посочена територия за време, което е непосилно за едно обикновено насекомо. Технологията има добри перспективи: поне автоматизацията на сглобяването ще ускори по-нататъшните изследвания в тази посока.


