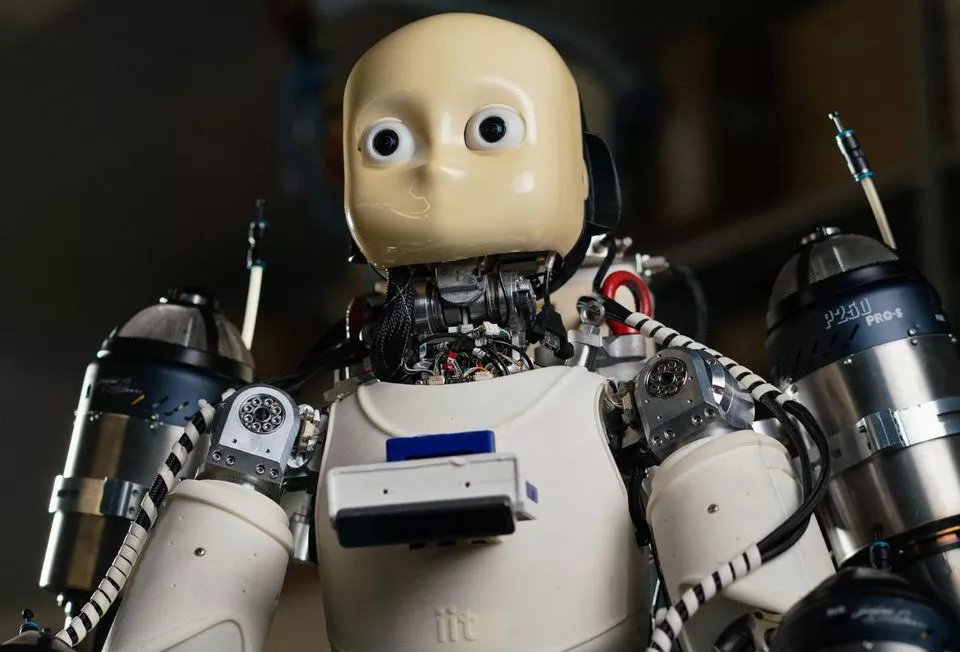
Учени от Италианския технологичен институт (IIT) в Генуа направиха пробив в роботиката с успешен полет на iRonCub3 – първия в света летящ хуманоиден робот с реактивни двигатели, проектирани за реална употреба. Това важно постижение е кулминацията на две години работа.
В последните си тестове iRonCub3 демонстрира способност да се издига на около 50 сантиметра, като същевременно остава стабилен. За да захранва полета си, роботът използва четири реактивни двигателя: по два на всяка от ръцете си и специална раница, прикрепена към гърба му.
Интегрирането на тези двигатели изисква значителни модификации в основния дизайн на iCub3, включително разработване на нов титаниев „гръбнак” за повишена здравина и добавяне на топлоустойчиви покрития, които да го предпазят от екстремни температури.
Общата маса на iRonCub3 с двигателите е около 70 килограма. Тягата на реактивните турбини надвишава 1000 нютона, което позволява на робота не само да се рее във въздуха, но и да извършва контролирани маневри дори при ветровити условия.
Температурата на отработените газове на двигателите достига 800 градуса по Целзий, което подчертава сложността на решаването на инженерни проблеми, свързани с термичната защита.
Основното предизвикателство за италианските инженери в този проект е уникалната, асиметрична и удължена форма на хуманоидния робот с разпределена маса и променлив център на тежестта. Това коренно го отличава от типичните симетрични дронове и изисква разработване на модели за балансиране на полета.
Моделите трябва да отчитат сложната динамика на робота и важното взаимодействие на реактивната тяга с движенията на крайниците му, които постоянно променят аеродинамичните характеристики на системата.
За да преодолеят тези предизвикателства, изследователите от IIT провеждат обширни експерименти в аеродинамичен тунел, извършват изчислителни изследвания на аеродинамиката и създават модели, базирани на изкуствен интелект.
Обучени както на компютърни симулации, така и на реални експерименти, AI моделите са интегрирани в архитектурата на управление на робота и са способни да оценяват аеродинамичните сили в реално време, осигурявайки стабилност на полета.
В процеса на проектиране изследователите са определили оптималното разположение на реактивните турбини, за да постигнат максимален контрол и стабилност по време на полет, а също така ефективно решават проблема с отвеждането на топлината от двигателите.
Роботът е фундаментално преработен за работа във въздушни условия, като е получил подобрени системи за управление на тягата и усъвършенствани алгоритми за планиране с цел координирано излитане и кацане.
Първите успешни полети на iRonCub3 са проведени в малка тестова зона в IIT. През следващите месеци тестовете ще бъдат прехвърлени на оборудвана площадка на летище Генуа, което ще позволи експерименти в по-големи и по-реалистични условия.
Очаква се iRonCub3 да се използва в сложни приложения като операции по търсене и спасяване, инспекции на опасни среди (например след бедствия или на промишлени обекти) и проучвателни мисии, които изискват както манипулативните възможности на хуманоиден робот, така и уникална въздушна мобилност.


