(илюстрация: MIT)
Изследователи от Масачузетския технологичен институт са разработили нова система, базирана на изкуствен интелект, която оптимизира формата и дизайна на роботите, така че да се движат по различни видове терени.
[related-posts]
Наречена RoboGrammer, системата автоматично създава оптималната структура на робот за даден набор от условия. Процесът започва с определяне на задачата от инженер, който въвежда основните параметри на системата – например, колела и възли с определен размер и тегло. След това инженерът указва терените, в които трябва да се движи роботът, вкл. хлъзгави повърхности или стъпала.
Докато хората-дизайнери на роботи обикновено използват едни и същи конструкции, RoboGrammer може да реализира нови идеи. Водещият разработчик Алън Джао описва системата като „начин да се измислят нови, по-изобретателни дизайни на роботи, които потенциално биха могли да бъдат по-ефективни”.
Системата RoboGrammer не е способна да работи напълно автономно. Човешката настройка обаче може да доведе до впечатляващи резултати. Черпейки вдъхновение от реални животни, изкуственият интелект проектира роботи, които изпълняват конкретни задачи.
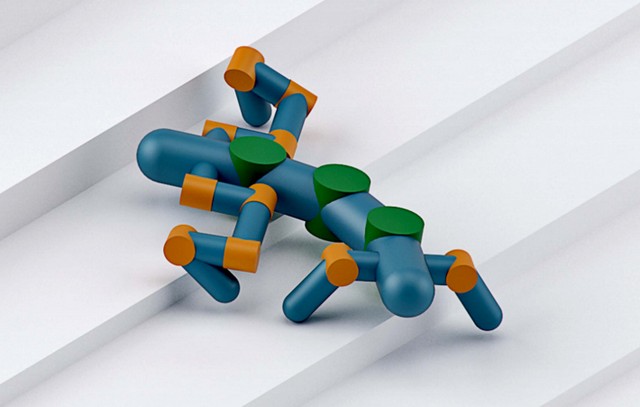
Така например, изкуственият интелект на RoboGrammer е създал кола, подобна на гущер, за движение по гладки повърхности, а за хлъзгав терен – машина, подобна на морж, която използва два крайника за бутане и плъзгане.
Сега екипът от изследователи на MIT планира да създаде и тества роботи, проектирани от изкуствен интелект, които са способни да се движат безпроблемно в реалния свят.


