(снимка: University of Notre Dame)
Ако една мравка, която търси храна, се натъкне на твърде широка пропаст, която не може да премине сама, тя се обръща за помощ към другите мравки: заедно те образуват мост от свързаните си тела. Такова поведение проявява и един малък четирикрак робот, който някой ден може да вдъхнови по-добри роботи за издирване и спасяване на хора.
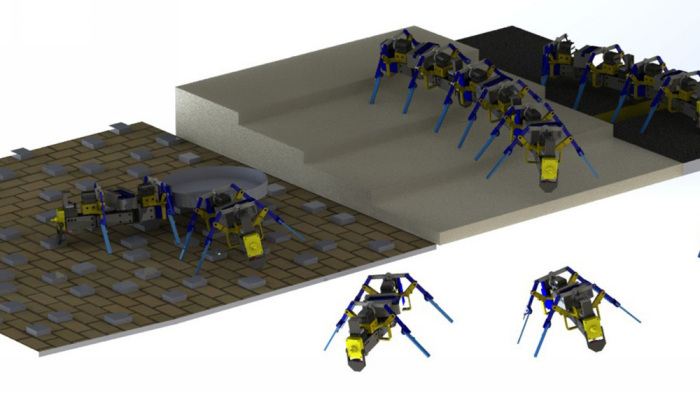
Четириногите роботи определено имат някои предимства пред колесните си колеги, включително факта, че могат да се катерят и да преодоляват препятствия, докато пресичат неравен терен, отбелязва NewAtlas. Поради това се очаква „рояци” от такива роботи да намерят приложение при търсене на оцелели при бедствия.
Но преодоляването на големи пропасти си остава предизвикателство и за колесните, и за четирикраките роботи. Имайки предвид тези ограничения, учени от университета на Нотр Дам са създали малки роботи – отпечатани на 3D принтер, които могат да работят заедно, за да се справят с подобни предизвикателства.
[related-posts]
Всеки от тях е с дължина от 15 до 20 см и има литиево-полимерна батерия, микропроцесор, монтиран отпред светлинен сензор, плюс един магнитен сензор за докосване отпред и друг отзад. Когато роботът се заклещи някъде (в тестовите елементи са използвани „трудности” като например дървени блокове, залепени за ПДЧ), той изпраща безжично сигнал до другите роботи, които се намират в близост.
„Колегите” пристигат и използват своите магнитни сензори за докосване, за да установят ориентацията си един спрямо друг. След това свързват телата си заедно във верига. По този начин роботите могат да образуват мост за пресичане на пропасти или да формират „влакче” за изкачване на препятствия, а дори могат да работят заедно, за да носят предмети, които са твърде големи или тежки за един отделен робот.
Подобни машини могат да се използват в операции по издирване и спасяване на пострадали в бедствия, а също и в приложения като изследване на космоса, мониторинг на околната среда или за изучаване на колективната динамика на насекоми като мравки и термити.


