Трикрак робот може да извършва ремонти от външната страна на Международната космическа станция и пътуващите около Земята космически кораби. Наречен MARM, той ще е полуавтономен.
Понастоящем във функционална форма на прототип, MARM е създаден от екип в италианския Istituto Italiano di Tecnologia (IIT), ръководен от Николаос Цагаракис. Името му е съкращение от Multi-Arm Relocable Manipulator и е разработен като част от проекта MIRROR (Multi-arm Installation Robot for Reading ORUs and Reflectors) на Европейската космическа агенция.
И макар че роботът вероятно би могъл да изпълнява голямо разнообразие от задачи, той е проектиран преди всичко да си проправя път по външната страна на космическия кораб, като инсталира и/или премахва орбитални резервни модули. Това са, по същество, всички модулни компоненти на космически кораби, които могат лесно да бъдат заменени, ако е необходимо.
[related-posts]
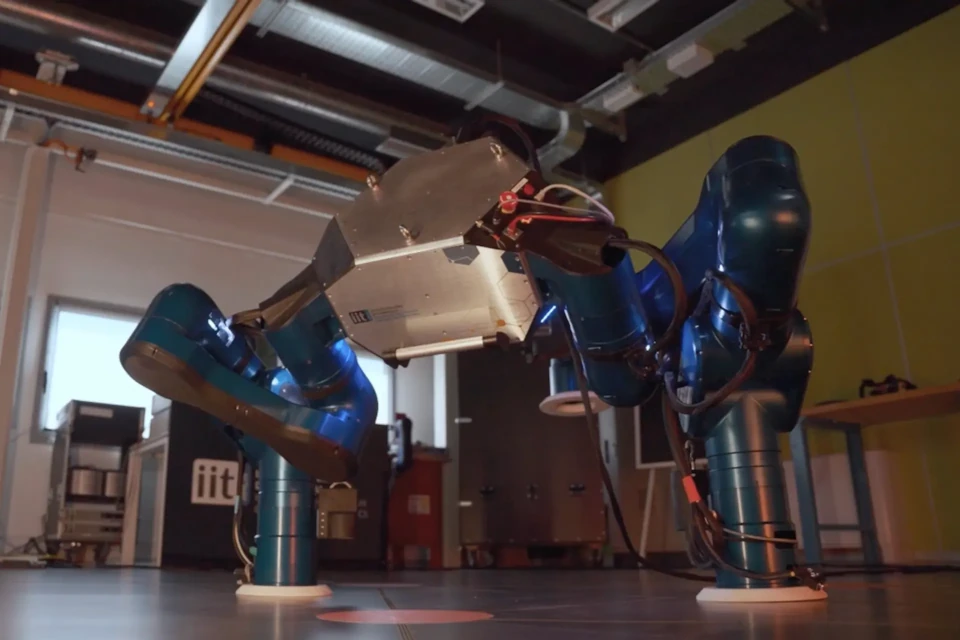
Роботът се състои от въртяща се основа, която наподобява тази на бозайниците, и три шарнирни крайника, които се използват като ръце и крака.
Заключващ механизъм в долната част на всеки крак/ръка захваща шестоъгълните изолационни плочки, които покриват външната страна на повечето космически кораби, поддържайки MARM прикрепен постоянно. Същият механизъм може да се използва за подмяна на плочките, ако е необходимо.
Ръцете могат да извършват зареждане на батерията на робота и изпращане/получаване на данни чрез докинг станции от външната страна на космическия кораб.
Предимство на дизайна на MARM е, че ходейки на три крака, роботът поддържа поне две точки на контакт по всяко време. В същото време може лесно да се движи във всяка посока. Освен това, когато използва един „крайник“ за изпълнение на дадена задача, другите два крайника служат като котви, осигурявайки изключително стабилна работна платформа.
Цагаракис казва, че MARM в крайна сметка ще бъде полуавтономен. Например, той ще използва вградени камери, за да постави краката си по най-правилния начин върху всяка плочка, докато „върви“ по повърхността на космическия апарат, който трябва да ремонтира. Все пак човек-оператор вероятно ще го напътства, докато взима орбитални резервни модули и ги поставя на място.
Плановете предвиждат роботът скоро да бъде тестван във физически симулатор, преди в крайна сметка да влезе в употреба на действителен космически кораб.


